


















Introdução
A ideia de robôs realizando ou auxiliando tarefas humanas é relativamente recente. O termo “robô” fui cunhado originalmente por Joseph Capek, no ano de 1921. A palavra é de origem tcheca (“robota”) e possui significado de “trabalho”. Ainda mais recentemente, o termo robô, bem como os termos realidade virtual, automação e assistência computacional, ganharam força dentro da área médica.
Há mais de 30 anos os robôs são utilizados dentro dos ambientes cirúrgicos e o rápido desenvolvimento tecnológico que o mundo vivencia tem aumentado de forma exponencial essa participação. Vamos agora analisar como foi o processo e a história do desenvolvimento da aplicação destas tecnologias, como evoluiu e o que esperar dela para os próximos anos.
O Início do Desenvolvimento Robótico
Na modernidade, os primeiros conceitos sobre criar máquinas com capacidade de realizar tarefas humanas surgiu no ambiente militar, há cerca de 60 anos. Os militares frequentemente necessitavam passar por procedimentos cirúrgicos, principalmente devido a politraumas e choque hemorrágico.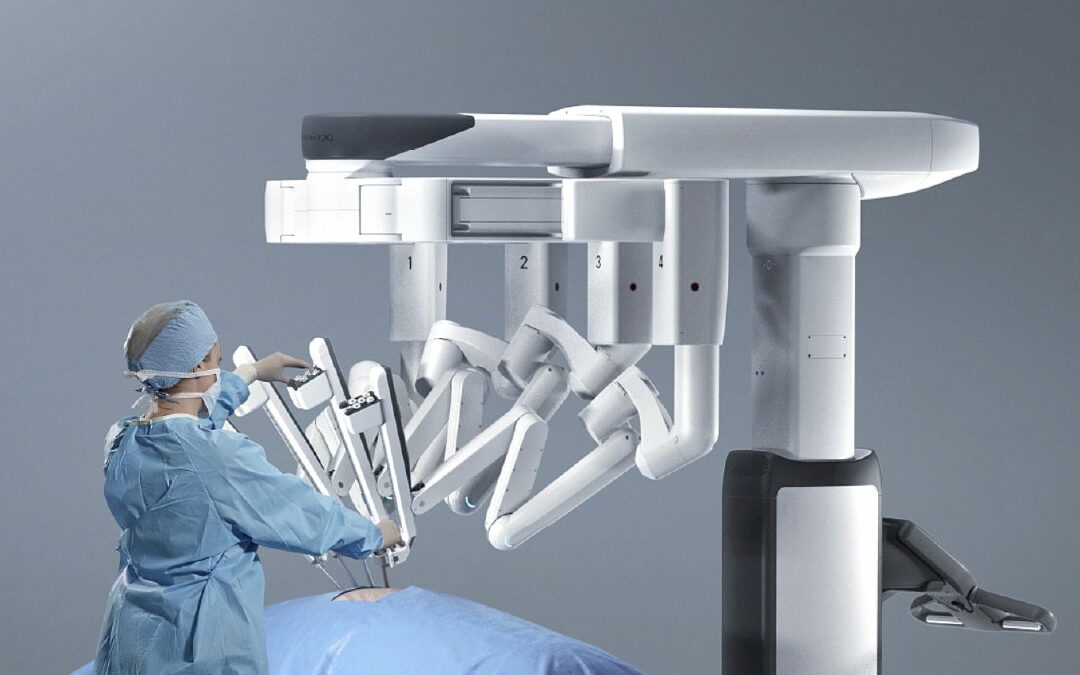
Por sua vez, a corrida espacial também contribuiu para o desenvolvimento dessa nova tecnologia. Com o lançamento dos satélites americanos e soviéticos para o espaço, e posteriormente a criação da Estação Espacial Internacional, os recursos médicos em áreas tão remotas quanto o espaço se tornava cada vez mais necessários.
Nesses contextos, militar e espacial, surge a necessidade e são desenvolvidas técnicas de telepresença médica e telemanipulação robótica para a realização de cirurgias.
Robôs: Uma Nova Era
O Programmable Universal Machine for Assembly 200 (PUMA) foi responsável pela primeira plataforma robótica utilizada para procedimentos cirúrgicos em um humano. Isso ocorreu no ano de 1985, onde foram realizadas biópsias neurocirúrgicas em um paciente. Após os primeiros procedimentos, a plataforma passou por algumas adaptações e também foi capaz de realizar alguns procedimentos urológicos.
O Robodoc Surgical System, criado em 1992, é um sistema guiado por imagem que permite a melhor adaptação do tamanho das próteses ortopédicas de quadril de acordo com o paciente e está ativo e liberado para uso pela FDA (Food and Drug Administration) até os dias de hoje.
Ainda na década de 90, foram criados vários outros robôs funcionais para diversas cirurgias, incluindo o AESOP (braço robótico controlado por voz e equipado com endoscópio) e o sistema ZEUS (que possui três braços e instrumentos cirúrgicos controlados pelo cirurgião) que posteriormente foi acompanhado do sistema SÓCRATES (que permitia o cirurgião controlar o sistema ZEUS de forma remota).
Em 1997, o Intuitive Surgical, localizado na Califórnia, lançou o robô/plataforma Mona, e com ele realizaram cirurgias como colecistectomia, fístulas arteriovenosas e procedimentos gástricos. Em 1998, Mona foi substituído pelo “da Vinci”.
Uma Nova Tecnologia: o robô “da Vinci”
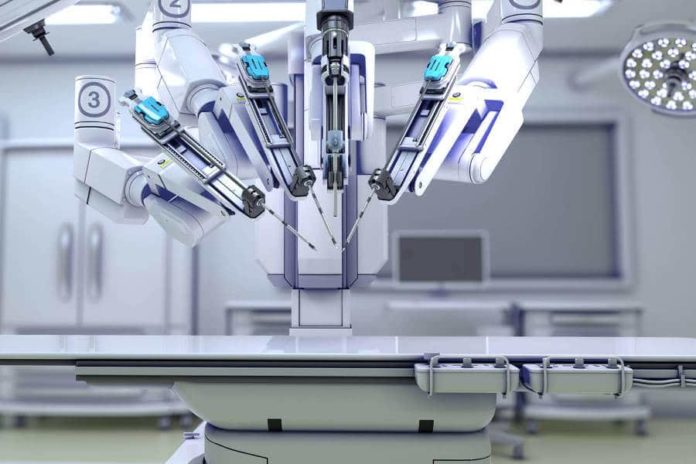
O robô “da Vince” foi aperfeiçoado em relação a seus antecessores. Ele possuía 3 componentes: o console do cirurgião, o carrinho do paciente e o sistema de imagem. Os braços robóticos estavam instalados diretamente no carrinho do paciente, o que facilitava sua montagem e posicionamento.
Os braços robóticos contavam com com grande amplitude de ação, imitando a articulação dos pulsos humanos. A visualização no sistema de imagem por parte do cirurgião é binocular, o que proporcionava maior foco e atenção do que o simples monitor. Além disso, o sistema conta com um dispositivo que elimina os tremores das mãos do cirurgião e permite ao mesmo regular o grau de sutileza em 5 escalas diferentes.
Em 2006, o “da Vinci” foi aperfeiçoado e surgiu o “da Vinci S” que contava com uma câmera 3D em alta definição e touchscreen. Já no ano de 2009 foi lançado o “da Vinci Si”, que se tornou a plataforma cirúrgica robótica mais difundida atualmente no mundo todo. O Si trouxe, entre outras novas funções, a possibilidade de simulações e treinamentos para os cirurgiões, além de melhorias nas imagens, como a captação de fluorecências em tempo real.
Em 2014 foi lançado o “da Vinci Xi”, mais aperfeiçoado e que superou algumas limitações do carrinho do paciente e da mobilidade dos braços cirúrgicos das quais sofriam seus antecessores.
O Que Esperar Para o Futuro
O desenvolvimento e aprimoramento de novos hardwares e softwares voltados para a cirurgia está cada vez mais acelerado. Os robôs estão sendo utilizados atualmente em todas as áreas cirúrgicas. O mercado da robótica médica tem crescido e, com isso, devemos esperar que a cada ano surjam mais e melhores modelos e plataformas com esta finalidade, devido a grande competitividade destas empresas.
Empresas como a Titan Medical, com sua plataforma SPORT, e a empresa Transenterix, com o modelo robótico Surgibot, já negociaram em 2017 seus ativos para a gigante chinesa MedTech. A Johnson & Johnson, com a plataforma Monarch, e a Cambridge Medical Robotics, com o Versius, também entram no mercado prometendo inovações e aperfeiçoamentos.
Referências
Aproveite e leia nosso artigo sobre IMPRESSÃO 3D E A MEDICINA
















{kind=link}